Well there are other costs in life than money, and you may just learn that the expensive and hard way - with costing you your health.
An interesting point which still surprises me is the utter denial of reality which many scooter owners on the various forums seem to have. Now I think its pretty clear from my blog that I happen to like scooters and use them a lot. However one things separates me from them: I accept that small wheels and even mild speeds do not go together.
Now there are many reasons for this but in this post I'll just go into one which should be obvious but seems to not be. But first lets refresh the difference in wheel size and suspension between a motorcycle (which I recommend for any speeds over 30kmh) and a scooter (which I enjoy using at any speeds under 30kmh, but occasionally hit 40 in specific down hill runs)

you don't need a degree in Engineering to see the difference and even inserting a Zero 10 in that picture would barely change the facts. Not only is the motorcycle wheel huge in comparison (and this one is among the smallest) but has quad piston dual disc brakes which will allow amazing heat shedding power in comparison to the itty bitty 120mm or maybe 140mm disc on a scooter that has a front disc system. (and HINT: with telescopic fork designs don't hit the front brakes when you're about to hit an obstacle or you'll compress your suspension and make matters worse)
Next, lets look at this small stone:

not much to look at really, and could easily be obscured by other cars on the road around you or you miss it because you're looking at what a car is doing. But when you put it on the road (and you don't see it) it represents this sort of obstacle to a scooter:

Not only does that stone probably go close to requiring the full travel of the scooter suspension, not only does it have an enormous relative size, but it also puts the energy of impact (the red line) almost totally away from the useful working of the suspension (the blue line). Meaning that the suspension will not be able to do much to absorb the intial impact, only if you have penumatic tyres will you get any cushioning (and may actually pinch a tube too).
Now lets look at the motorbike wheel

not only is the rock barely significant, barely even compressing the tyre much (while it would probably result in a pinched tube on a Zero 10x or similar {and it'll be worse for smaller scooter wheels}), the shock of rolling over that is directly in line with how the telescopic forks compress, allowing the suspension to exactly do what is needed.
You would not even notice this rock if your were riding at 40km on the motorcycle, but it would likely spit you off on any scooter (perhaps something with really big wheels with fat compliant tyres like the Hollyburn P5 would not).
So if after reading this you intend to keep kidding yourself that any scooter is OK at even 40kmh (people say that's slow) reflect on that experience at 80kmh (which the Zero 10x can do).
People used to call motorcycle riders "temporary Australians" ... I'd say more so for scooter riders who refuse to accept the limitations of their machines.
And I haven't even touched on stability over plain bumps or potholes or what is rake and trail yet ...
So, when doing your financial planning, ask yourself how much your injuries are worth in that economic balance.
PS: I found this well written review on the Zero 10x recently on Reddit and thought it should be shared, mainly because the fellow is well tempered and not just a High Speed Scooter Jihadi.
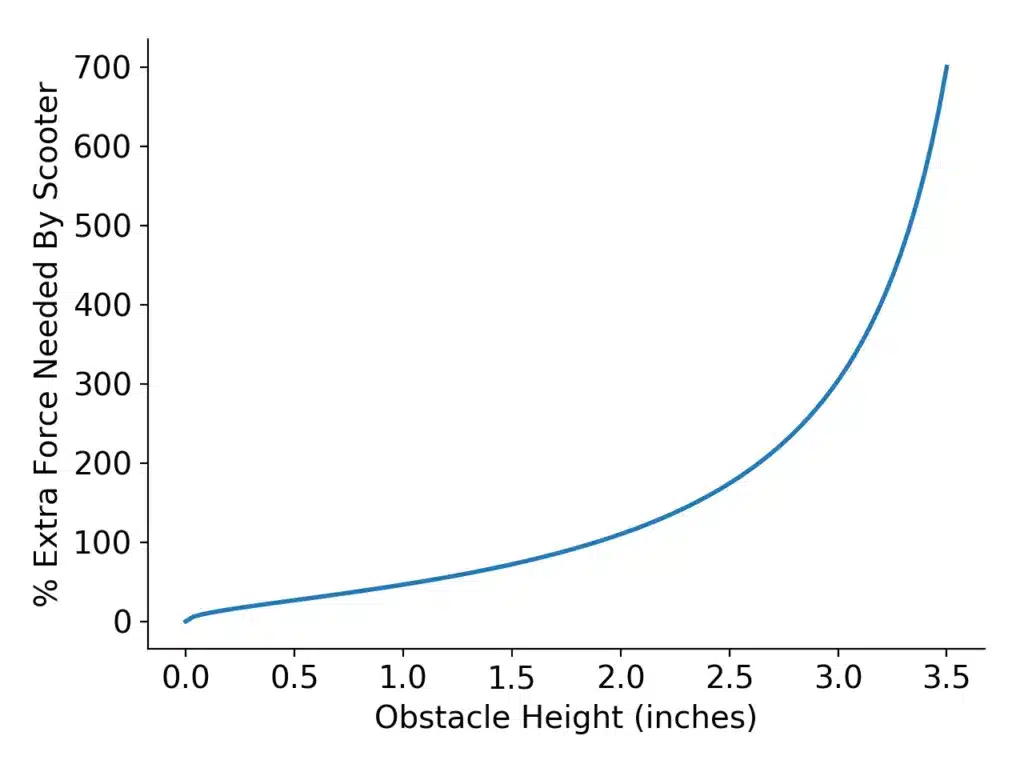
And I hope that the following diagram makes totally clear why that energy rating is so, as while both wheels have to raise up 1 inch, the impact to forward momentum on the bicycle is quite different (look at where the obstacle is relative to the center of the wheel, most of the wheel is already past it on the bicycle, allowing the rest to roll over it, but not on the scooter.
 This of course leads me to one last point: falling off
This of course leads me to one last point: falling off

So each step up of 10kmh nearly doubles the smack factor, stepping up from a "you can nearly run that fast" speed of 20kmh (or not yet 13mph) to 30 nearly doubles the smack (impact) force you'll experience and going up to 40kmh (which is just over 24mph, and soome people don't think is fast) takes you to over three times the forces.
The common answer is "slip on a full face skid lid" ... sure ... that may help a bit but won't help the other very significant parts of you



and last but not least, a guy I now ... all in one fall

So while dreaming about which cosplay helmet you want, think about "do you really want to go fast on a scooter?"
So buy any helmet you like but think about what happens.
An interesting point which still surprises me is the utter denial of reality which many scooter owners on the various forums seem to have. Now I think its pretty clear from my blog that I happen to like scooters and use them a lot. However one things separates me from them: I accept that small wheels and even mild speeds do not go together.
Now there are many reasons for this but in this post I'll just go into one which should be obvious but seems to not be. But first lets refresh the difference in wheel size and suspension between a motorcycle (which I recommend for any speeds over 30kmh) and a scooter (which I enjoy using at any speeds under 30kmh, but occasionally hit 40 in specific down hill runs)

you don't need a degree in Engineering to see the difference and even inserting a Zero 10 in that picture would barely change the facts. Not only is the motorcycle wheel huge in comparison (and this one is among the smallest) but has quad piston dual disc brakes which will allow amazing heat shedding power in comparison to the itty bitty 120mm or maybe 140mm disc on a scooter that has a front disc system. (and HINT: with telescopic fork designs don't hit the front brakes when you're about to hit an obstacle or you'll compress your suspension and make matters worse)
Next, lets look at this small stone:

not much to look at really, and could easily be obscured by other cars on the road around you or you miss it because you're looking at what a car is doing. But when you put it on the road (and you don't see it) it represents this sort of obstacle to a scooter:

Not only does that stone probably go close to requiring the full travel of the scooter suspension, not only does it have an enormous relative size, but it also puts the energy of impact (the red line) almost totally away from the useful working of the suspension (the blue line). Meaning that the suspension will not be able to do much to absorb the intial impact, only if you have penumatic tyres will you get any cushioning (and may actually pinch a tube too).
Now lets look at the motorbike wheel

not only is the rock barely significant, barely even compressing the tyre much (while it would probably result in a pinched tube on a Zero 10x or similar {and it'll be worse for smaller scooter wheels}), the shock of rolling over that is directly in line with how the telescopic forks compress, allowing the suspension to exactly do what is needed.
You would not even notice this rock if your were riding at 40km on the motorcycle, but it would likely spit you off on any scooter (perhaps something with really big wheels with fat compliant tyres like the Hollyburn P5 would not).
So if after reading this you intend to keep kidding yourself that any scooter is OK at even 40kmh (people say that's slow) reflect on that experience at 80kmh (which the Zero 10x can do).
People used to call motorcycle riders "temporary Australians" ... I'd say more so for scooter riders who refuse to accept the limitations of their machines.
And I haven't even touched on stability over plain bumps or potholes or what is rake and trail yet ...
So, when doing your financial planning, ask yourself how much your injuries are worth in that economic balance.
PS: I found this well written review on the Zero 10x recently on Reddit and thought it should be shared, mainly because the fellow is well tempered and not just a High Speed Scooter Jihadi.
If you haven't read this good simple exploration I recommend it, allow me to quote the relevant portions on why a scooter is inherently more dangerous than a bicycle.
Speed matters
You see physics is a harsh mistress, and she has a few dictates, like Force = Mass times Speed squared. Your mass is a constant, so lets just work out the smack factor involved with just change of speed. Spreadsheets make this a simple task. So here I've got speed steps going up in 5kmh steps, and you can see that each speed step results in an ever enlarging smack factor.
So each step up of 10kmh nearly doubles the smack factor, stepping up from a "you can nearly run that fast" speed of 20kmh (or not yet 13mph) to 30 nearly doubles the smack (impact) force you'll experience and going up to 40kmh (which is just over 24mph, and soome people don't think is fast) takes you to over three times the forces.
The common answer is "slip on a full face skid lid" ... sure ... that may help a bit but won't help the other very significant parts of you



and last but not least, a guy I now ... all in one fall

So while dreaming about which cosplay helmet you want, think about "do you really want to go fast on a scooter?"
So buy any helmet you like but think about what happens.











































